Introduction
The idea for this project originated when I was searching for a hands-on challenge to develop my skills in designing and integrating mechanical systems—such as gears, moving mechanisms, levers, and print-in-place assemblies.
During my research, I explored various projects online to gather inspiration and quickly narrowed it down to two main options: a wall clock or an RC car. I ultimately chose the RC car, as it offered a more complete mechanical system and, importantly, a far more engaging and practical testing experience.
For my initial approach, I decided to build an existing design to gain foundational experience and better understand real-world constraints—such as which components require reinforcement and how certain design details perform under stress. I chose to build the Tarmo 5 RC car build from @EngineeringNS.
After completing this first prototype, I documented the key areas for improvement, which now serve as the foundation for developing my own refined design.
Design
When I started to design this car the first thing I wanted to have clear is how to distribute the power from the motor. The first problem come with the base RPM of the motor, as a brushless motor spins way too fast for our pourpose we need to reduce that spee with a very big difference in the gears. In order to not make the gears too big we need a very small gear in the motor, when 3D printing this gear it is usually too small tooth area and dont last too long.
To fix this issue on my car I decided to use belts for power transmision. On a first glance I wanted to make it full power transmision with belts wich lead me to this very early mockup, wich contains the belt diferencial:
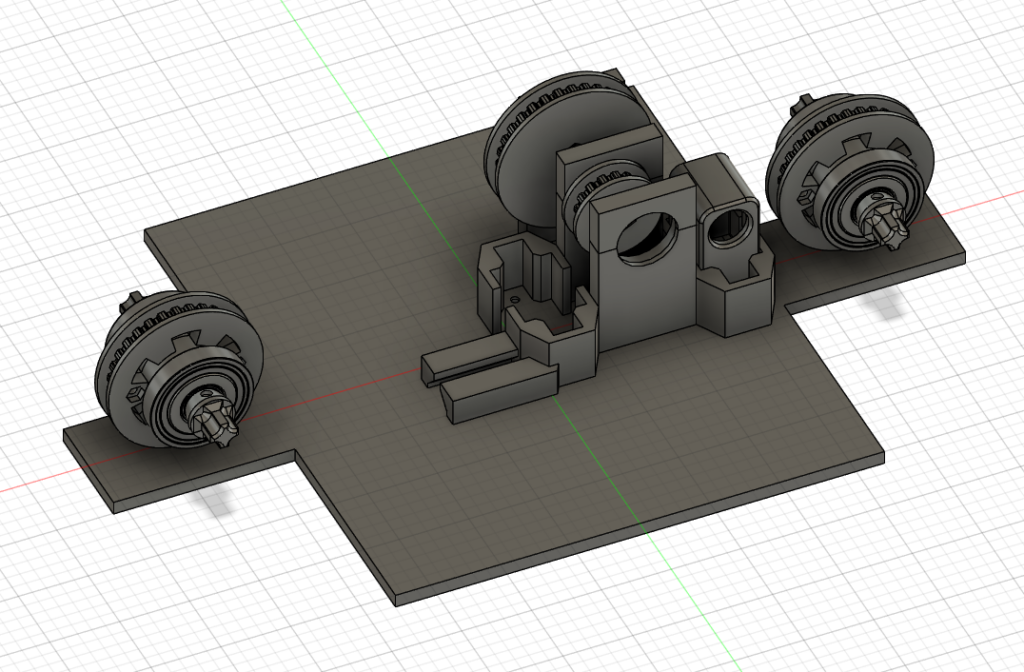
After some tinkering I ended up throwing the idea of a full belt driven car and design a half shaft half belt car with a belt runing from the motor gear to the main distribution gear and then a solid shaft running to each diferencial.
